三维重建,单目相机+结构光,实时扫描重建代码,
”三维 3D 单目相机“ 的搜索结果

工程编译和运行:编译:cd buildcmake ..make运行:运行的结果将在命令行中显示出来。
相机标定主要是想得到相机的内参(internal parameters),根据笔者以前学过的知识和在网上浏览的大量案例,发现目前使用最多的标定方法还是“棋盘标定法”。 首先我们要打印出一张棋盘,为尽量减少外部环境的干扰,...

我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图,彩色图是RGB三通道,每个...
基千此, 论文分别采用激光雷达点云数据和单目相机图像数据, 结合深度学习方法, 围绕激光雷达点云和单目图像分别进行三维目标检测任务,并进行了理论分析、 方法验证、 结果分析等工作, 主要研究内容如下: ...
单目相机三维姿态解算 Abstract:This passage mainly describes how to solve pose(Yaw,Pitch,Roll)with signal camera in three-dimensional,which bases on OpenCV library. Key words: OpenCV; Pose;...
单目双视三维坐标确定
标签: 算法
单目双视三维坐标确定


单目相机三维姿态解算 Abstract:This passage mainly describes how to solve pose(Yaw,Pitch,Roll)with signal camera in three-dimensional,which bases on OpenCV library. Key words: OpenCV; Pose;...
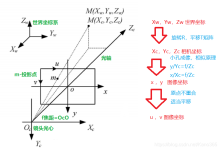
上图二维平面中,OiO_{i}Oi为图像坐标系原点,OdO_{d}Od是像素坐标系,像素坐标系相对于图像坐标系原点有些偏移。世界坐标系与相机坐标系之间的转换矩阵:转换关系数学表达: [xcyczc1]=[R3×3T3×1O1]⋅[xwywzw1...

IJGIS 《GIS augmented video surveillance》 40引用 2021/1/24阅读 雨 春节临近 cite Milosavljević, A., et al. (2010). “GIS-augmented video surveillance.” International Journal of Geographical ...
第一章 引言 ...使用像LiDAR和Kinect这样的复杂3D传感器进行SLAM目前已经有了较为成熟的技术方案,尤其是在大多数的室内环境中进行SLAM已经有了比较完善的方法[1]。然而,这些3D传感器诸如LiDAR的高成本和K..

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达有一天,蟹老板找底下的员工川建国同学:等蟹老板走后,然后转头问旁边的学霸李雷同学:李雷同学整理了下情绪:有人反映哦,有时候我们发出来...
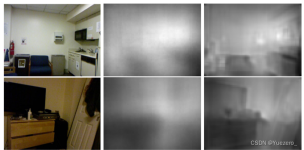
基于多频外差法的单目三维重建可以在使用一个相机的情况下获取到高精度的三维数据,如单目三维重建。 在使用的过程会遇到一个问题,就是一个相机无法获取到物体完整的三维数据情况,如下图所示,第一副和第二幅 ...


要进行单目相机的深度估计 需要先对相机进行相机的标定获得内外参数
机器人,无人机三维姿态解算,求三维姿态欧式角,即俯仰角,偏航角,滚轮角,能用于机器人抓取物体。

import cv2 import numpy as np import glob def draw(img, corners, imgpts): corner = tuple(corners[0].ravel()) img = cv2.line(img, corner, tuple(imgpts[0].ravel()), (255,0,0), 5) ...
我们知道在机器视觉中通常要使用的搭建的视觉测量系统对一个物体的尺寸、形变、以及三维形貌进行测量。一般按照摄像机的个数以及组成部分分为三类测量方法。分别为单目测量、双目(大于2为多目)测量、以及结构光...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地